-
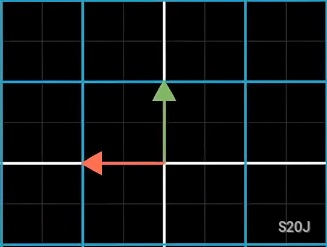
交换 A 的两行/列,行列式取反
证明:我们不考虑换A ,考虑换 p 的两个位置,这玩意等于就是在算 τ(p) 的时候不交换,但是在弄 Ai,pi 时交换,这显然是正确的,因为一次对换后奇偶性发生改变,所以时相反数
-
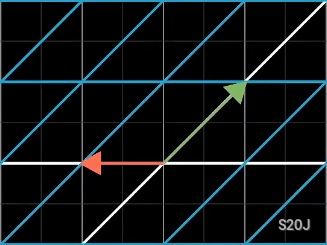
A 的行/列所有元素等比例变化,则行列式也等比例变化(这是显然的)
deta1,1a2,1⋮k×ax,1⋮an−1,1an,1a1,2a2,2⋮k×ax,2⋮an−1,2an,2⋯⋯⋱⋯⋱⋯⋯a1,na2,n⋮k×ax,n⋮an−1,nan,n=k×deta1,1a2,1⋮ax,1⋮an−1,1an,1a1,2a2,2⋮ax,2⋮an−1,2an,2⋯⋯⋱⋯⋱⋯⋯a1,na2,n⋮ax,n⋮an−1,nan,n
-
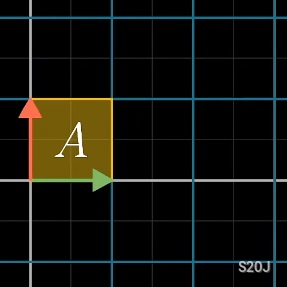
如果矩阵 A 中有一行/列,是对应 2 个矩阵 B,C 中分别的 2 相同位置的行/列所有元素之和。那么有 det(A)=det(B)+det(C) (也是显然的)
deta1,1a2,1⋮bx,1+cx,1⋮an−1,1an,1a1,2a2,2⋮bx,2+cx,2⋮an−1,2an,2⋯⋯⋱⋯⋱⋯⋯a1,na2,n⋮bx,n+cx,n⋮an−1,nan,n=deta1,1a2,1⋮bx,1⋮an−1,1an,1a1,2a2,2⋮bx,2⋮an−1,2an,2⋯⋯⋱⋯⋱⋯⋯a1,na2,n⋮bx,n⋮an−1,nan,n+deta1,1a2,1⋮cx,1⋮an−1,1an,1a1,2a2,2⋮cx,2⋮an−1,2an,2⋯⋯⋱⋯⋱⋯⋯a1,na2,n⋮cx,n⋮an−1,nan,n
-
如果 A 存在两行/列成比例则 det(A)=0
deta1,1a2,1⋮ax,1⋮k×ax,1⋮an−1,1an,1a1,2a2,2⋮ax,2⋮k×ax,2⋮an−1,2an,2⋯⋯⋱⋯⋱⋯⋱⋯⋯a1,na2,n⋮ax,n⋮k×ax,n⋮an−1,nan,n=0
证明:对于排列 p 做一个第 x 行和第 y 行的变换,发现行列式互为相反数,所以为 0 ,列同理
-
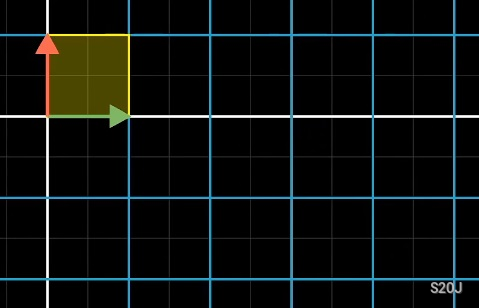
把 A 的一行/列的值全部乘一个常数加到另一行/列上,行列式值不变
deta1,1a2,1⋮ax,1⋮ay,1⋮an−1,1an,1a1,2a2,2⋮ax,2⋮ay,2⋮an−1,2an,2⋯⋯⋱⋯⋱⋯⋱⋯⋯a1,na2,n⋮ax,n⋮ay,n⋮an−1,nan,n=deta1,1a2,1⋮ax,1⋮k×ax,1+ay,1⋮an−1,1an,1a1,2a2,2⋮ax,2⋮k×ax,2+ay,2⋮an−1,2an,2⋯⋯⋱⋯⋱⋯⋱⋯⋯a1,na2,n⋮ax,n⋮k×ax,n+ay,n⋮an−1,nan,n
证明:将后面那个矩阵用性质 3 拆开,有
deta1,1a2,1⋮ax,1⋮ay,1⋮an−1,1an,1a1,2a2,2⋮ax,2⋮ay,2⋮an−1,2an,2⋯⋯⋱⋯⋱⋯⋱⋯⋯a1,na2,n⋮ax,n⋮ay,n⋮an−1,nan,n=deta1,1a2,1⋮ax,1⋮ay,1⋮an−1,1an,1a1,2a2,2⋮ax,2⋮ay,2⋮an−1,2an,2⋯⋯⋱⋯⋱⋯⋱⋯⋯a1,na2,n⋮ax,n⋮ay,n⋮an−1,nan,n+deta1,1a2,1⋮ax,1⋮k×ax,1⋮an−1,1an,1a1,2a2,2⋮ax,2⋮k×ax,2⋮an−1,2an,2⋯⋯⋱⋯⋱⋯⋱⋯⋯a1,na2,n⋮ax,n⋮k×ax,n⋮an−1,nan,n
由性质 4 可得,最后那个矩阵的行列式为 0